今月のトランジスタ技術は、自律走行ロボットの話。
今月号も、別冊がついて 1,170円。
トランジスタ技術 2024年7月号の特集は、「月面探査 自律走行ロボット」
表紙は、日本ファインケムの E&C HVR10000シリーズ 超高標準抵抗器。
裏表紙は、コンテックのRaspberry Pi HATサイズ。
巻頭
巻頭カラー連載
- 激熱エレキ!僕たちトラ技団 15:新生!ネジの千石電商!
- エンジニアのための宇宙開発ウォッチ 31:月面を走る日本車!トヨタの有人ローバ
Information
- ローム 6432サイズ 0.5〜1.5mΩ シャント抵抗 PMR100HZP7FV
- 東芝デバイス 120V バイポーラトランジスタ TTA014、TTC023
- 日清紡マイクロデバイス GNSS用 低ノイズアンプ NT1195
- ルネサス ジッタ25fsRMS、12出力 FemtoClock3ファミリ
- STマイクロ Cortex-M0+ マイコン
SPECIAL企画 :技術フロンティアたちの挑戦
- 準天頂衛星「みちびき」…日本のcm級測位の今と未来像: 洋上や海外でもcm測位、2026年から 7機体制
- 小型月面探査機SLIM 開発者インタビュー 1:月面着陸を成功に導くための設計
S爺
月面着陸 SLIMの衝撃吸収剤は、ハニカム構造のスポンジになっているw
特集:月面探査に学ぶ 自律走行ロボット
イントロダクション
- イントロダクション 宇宙で活躍するさまざまなロボット&ローバ:
第1部:宇宙を目指せ!自律走行ローバ
- 自作の自律走行ローバ ブラックロック砂漠打ち上げ実験:
- 民間宇宙開発団体:リーマンサット・プロジェクト
- 宇宙を目指して自作!自律走行ローバの概要:宇宙ローバに求められる自律走行のシーケンス
- 自律走行ローバの電気系:自律制御はラズパイ。センサ/モータ制御をマイコンで
- 堅牢さが求められる宇宙ローバの機構:着陸のショックに耐えるための工夫
- 宇宙ローバの自律走行ソフトウェア :確実なミッションを遂行するための 予測不能のパラメータ
- ホントに宇宙を走るローバに仕上げるには:耐放射線試験と自己位置推定
第2部:月面探査に学ぶ!ローバの制御技術
- 軟弱な地面を移動する!ローバの機構:農業分野へ応用、 柔らかい車輪、可変ホイルベース、車高可変
- 近くて遠い…月面の環境
- 回転-直線運動を変換する ラック・アンド・ピニオン・ギア
- 月面障害物をすり抜ける!ローバ自律走行の基礎知識:カメラ/LiDAR/自己位置推定/AIで 未知な環境を走行
- ガチなリモート操作のキモ!ネットワーク遅延の補償制御:地球と月は片道2s!遠隔の建設から医療まで期待
- 月は着陸から居住の時代へ
第3部:宇宙機に学ぶ…高信頼性の設計技術
- 月面探査機に学ぶ高信頼性のワイヤレス給電:過酷な月の夜越えを3度成功したSLIM、日本の技術力
- 実験用キットを組み合わせたお試し実験のススメ
- 親和性が高い…宇宙で使えるワイヤレス給電
- シミュレーション活用!18V100W太陽光発電システムの設計:地上も宇宙もパワエレはコンピュータで
- 宇宙環境での太陽光発電の重要性とシステム設計の注意点
- 宇宙機に学ぶ!信頼性のための熱収支管理:周囲温度が大きく変化する月面ローバで考えてみた
- エアコンを一番身近な熱収支管理マシンとして見る
- 宇宙でOK!高速回転なのに鉄損を抑えた新型モータの実力:35V駆動で重さ25g&出力50W…火星探査機ローバ用モータの開発
一般(投稿)
- 自由にHDMIの解像度設定!EDIDエミュレータの製作:マイコン基盤で作る Arduino IDE×UNO R4/STM32/ESP32/RP2040
これは作りたいけど… プログラムソースは トラ技公式サイトからダウンロードできる。
トラ技Jr.コーナ
- 10Wをワイヤレス給電でドバッ!4m2秒の爆走ミニ四駆の製作:シンプルな最新MHz帯電界結合ワイヤレス給電&電池レス走行
- 平面型で作りやすい「コプレナ・ストリップ導波路」とは
- 理論革命…21世紀のワイヤレス給電の超キホン:EVやドローンの充電ステーションなどに期待
- 誰でも手ぶらで参加OK!ワイヤレス給電走行ミニ四駆コンテスト
RFコーナ
- スマホからBluetooth LE経由でLチカ体験 後編:超小型9×3mm!定番nRF52832搭載Bluetooth LE無線モジュール事始め
連載
- 回路動作から設計するプリント基板入門 2:「出力バッファのウソ」ドライブ能力の現実
- 20~20kHzで-150dBc!FFT超低ひずみ測定システム 9:CR部品の微小ひずみ測定用32V出力パワー・アンプの仕上げ
トラ技Jr.コーナ
- ミニ火力発電!熱式AMラジオの製作:オンライン通販で1000円の冷却用ペルチェの電源でラジオを鳴らす
- ペルチェで熱エネルギーを直接電力に変換する原理
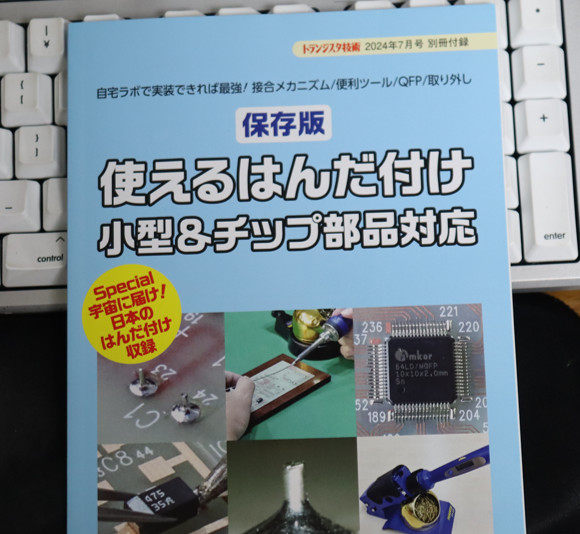
別冊付録:保存版 使えるはんだ付け 小型&チップ部品対応
ハンダ付けの教科書。電子工作初心者必携!
- 表面実装対応!正しいハンダ付けの教科書
- お手本!理想的なはんだ付け
- 知っておこう!はだいづけで強く「付く」メカニズム
- 強い結合を得るポイント…はんだとフラックス
- 3秒が勝負!正しいハンダ付けの作法
- ハンダ付けの良し悪し目視チェック
- その1:リード線のハンダ付け
- その2:小型&表面実装部品のハンダ付け
- 小型&チップ時代の電子工作テクニック
- 表面実装時代もベースは「ユニバーサル基板」から
- ハンダ付けに必要な道具の選択
- 基本的なハンダ付けのポイント
- 実装済み部品の外し方
- チップ部品&狭ピッチICのハンダ付けのポイント
- ピッチ変換に便利なシール基板
- 適切な線材の選び方
- 重要工具…ニッパやピンセットの選び方
- とにかく便利…「竹串」の利用方法
- 細かすぎる小型&チップ部品の取り扱い治具
まとめ
宇宙開発は、技術大国の証である。
メカトロニクスの究極の形、自律ロボットは、人手不足で衰退する日本の救世主でもある。
電源の確保ができない場所で(太陽光や水力)自家発電、マイコンの自立制御で機械的動作とAI学習、観測&動画データを送信、遠隔遠隔操作。
人が常駐してやる単純作業は、自律ロボットに代替していこう。
中国に遅れをとる、衰退する”後進国”となった日本は、宇宙開発の人材を充実させなければならない。
今どきの宇宙開発って どんなものなのか? を知ることのできる 今月の特集。興味のある人は 買い。
ハンダ付けの教科書をまだ持っていない人も買い。